Introducción a las TI
Comandos a revisar
-Renice
-Sleep
-Jobs
-Fg
-Bg
Actividad Evaluada
- Para estos 5 comandos explicar:
-Funcionalidad del comando
-Sintaxis
-Ejemplo práctico
Además, relacionar con el uso del comando kill, ps y top.
1.- Renice
Funcionalidad del comando:
Altera la prioridad de los procesos en ejecución.
Sintaxis:
renice pri [-p pid] [-g pgrp] [-u user]
las opciones son:
* -p pid cambia la prioridad para el proceso especificado
* -g pgrp cambia la prioridad para los procesos ejecutados por los
usuarios que pertenecen al grupo con ID=pgrp
* -u user cambia la prioridad para los procesos del usuario
especificado
Ejemplo:
$ abiword &
[1] 7681
$ renice 10 -p 7681
7681: old priority 0, new priority 10
$ renice 3 -u tomas
503: old priority 0, new priority 3
2.- Sleep
Funcionalidad del comando:
Deja dormida la consola durante el tiempo que se define.
Comandos UBUNTU
s = Segundos
m = Minutos
h = Horas
Sintaxis:
sleep(tiempo que se dormirá la máquina + (s/m o h según se quiera)
Ejemplos:
sleep 5s
Deja dormida la consola durante 5 segundos.
sleep 30s 5m
Deja dormida la consola durante 30 segundos + 5 minutos.
3.- Jobs
Funcionalidad del comando:
El comando jobs se utiliza para listar procesos que estés ejecutando
en segundo plano o en primer plano. Si la respuesta se devuelve sin
información es que no hay procesos presentes.
Sintaxis:
jobs [opciones]
las opciones son:
-l
Informa del identificador del grupo de proceso y la carpeta de
trabajo de las operaciones.
-n
Muestra sólo los trabajos que se han detenido o cerrado desde
la última notificación.
-p
Muestra sólo el identificador de proceso para los líderes de
grupo de procesos de los trabajos seleccionados.
Ejemplo:
1.jobs -l
Muestra los trabajos que estás ejecutando en primer plano (o) en
segundo plano.
2.jobs -p
Muestra sólo el identificador de proceso para los trabajos listados.
4.- Fg
Funcionalidad del comando:
El comando fg se utiliza para situar un proceso en primer plano.
Sintaxis:
fg [especifica proceso]
Comandos UBUNTU
Ejemplo:
Para mover un proceso a primer plano:
Iniciemos tres procesos y suspendamos esos procesos en
segundo plano.
kmail- inicia el cliente de correo.
Presiona ctrl+z para detener el proceso actual.
xmms- reproductor de música.
Presiona ctrl+z para detener el proceso actual.
sleep 120- un proceso de prueba.
Presiona ctrl+z para detener el proceso actual.
jobs
El comando anterior mostrará los procesos en la shell.
[1] Detenido
[2]- Detenido
[3]+ Detenido
fg 1
El comando anterior ejecutará la aplicación kmail en primer
plano.
5.- Bg
Funcionalidad del comando:
El comando bg se utiliza para mover un trabajo a segundo plano. El
usuario puede ejecutar un proceso en segundo plano añadiendo un
símbolo "&" al final del comando.
Sintaxis:
bg [opciones] [proceso]
las opciones son:
-l
Informa del identificador del grupo de proceso y la carpeta de
trabajo de las operaciones.
-p
Informa únicamente del identificador del grupo de proceso de
las operaciones.
Comandos UBUNTU
-x
Sustituye cualquier job_id encontrado en el comando o
argumentos con el identificador de grupo de proceso correspondiente,
después ejecuta el comando dándole argumentos.
job Especifíca el proceso que quiere ejecutarse en segundo plano.
Ejemplo:
Para Ejecutar un proceso en segundo plano
kmail- inicia el cliente de correo.
Presiona ctrl+z para detener el proceso actual.
Ahora sólo escribe bg para mover el último proceso detenido a
segundo plano.
Relaciones entre comandos
Kill: El comando kill se usa para detener procesos en segundo plano.
Ps: El comando ps se usa para informar del estado del proceso. ps es
la abreviatura de Process Status.
Top: El comando TOP muestra a tiempo real un listado de los
procesos que se están ejecutando en el sistema, especificando
además el % de Cpu y Memoria que están utilizando, sus IDs,
usuarios que lo están ejecutando, etc.
La relación que tienen estos 3 comandos, con los 5 analizados
anteriormente es que todos son compatibles entre ellos. Todos están
asociados a la administración o control de procesos, para así, dar
mayor comodidad o rendimiento al usuario, según él estime
conveniente.
Integrantes Grupo:
Alamiro Solis .
Ninoska Ulloa.
Washington Arevalos
Camilo Rivas
viernes, 9 de diciembre de 2011













jueves, 8 de diciembre de 2011
Informe Grupal Programación de Robots
Informe Grupal: Proyecto #2
Integrantes y cargos:
Camilo Rivas: Productor Multimedia.
Washinton Arevalos: Staff de Apoyo.
Ninoska Ulloa: Jefe de Grupo.
Alamiro Solis: Secretario.
Introducción:
En esta actividad la responsabilidad se nos dió a nosotros para crear lo que nosotros queramos con nuestro robot. Esta actividad puede ser junto a otro grupo o individual, en esta ocasión como grupo decidimos trabajar solos. Para ello nuestro robot simulara un autobús donde recolectara pasajeros en distintos paraderos, de tal manera que al completarse de pasajeros solo se dirija a destino y no recolecte más pasajeros, para ello nuestro robot debe cumplir con lo siguiente que se nos ha pedido: Manejar las estructuras de datos Arreglos (Arrays) y Archivos, y manejo de tareas concurrentes.
Además en esta actividad ocuparemos el sensor de sonidos, ultrasonido, luz y tacto, el cual cada uno de ellos cumplirá una función determinada por nosotros para que nuestro robot funcione a la perfección y cumpla con lo que son pide y nosotros mismo nos hemos propuesto realizar.
Estrategia de solución:
Durante la primera semana de trabajo, en esta actividad procedimos de la siguiente manera. Como en todas las actividades anteriores el staff de apoyo se preocupó de retirar los kits de trabajo de los estantes y ubicarlos en una mesa de trabajo. Posteriormente, revisó la bateria y la puso a cargar.El staff de apoyo y productor multimedia se encargan de dar la estructura adecuada al robot para que se desenvuelva de la mejor manera posible en su misión. Se acuerda un modelo simple, con sensores de ultrasonido, sonido, tacto y luz. El sensor de ultrasonidos nos ayudará a detectar vehículos en la carretera, los cuales esquivará o reducirá la velocidad para no chocarlos. Se llevará el conteo de cada paradero y de las personas que se subirán en cada uno de ellos. Lo que hará el sensor de tacto es dar instrucción de detenerse al bus en caso de choque. El sensor de sonido, al realizar un ruido, simulará la cantidad de pasajeros que subirán en cada paradero.
Respecto a la programación, el secretario y jefe de grupo comienzan a realizar el programa, surgen algunas complicaciones pero finalmente son solucionadas. Luego el staff de apoyo y productor multimedia se suman al equipo de programación para reforzar algunas debilidades que pudieran tener los otros integrantes.
Por motivos de tiempo, no pudimos avanzar más, el staff de apoyo devuelve los kits al estante.
Durante la segunda semana de trabajo, el staff de apoyo procede de la misma forma que la semana anterior. Se termina el programa y se realizan las pruebas. Se ven las deficiencias que tiene el programa, se hacen correcciones hasta que el robot genera el resultado esperado.
Finalmente el productor multimedia graba el video, edita y sube el video a la red.
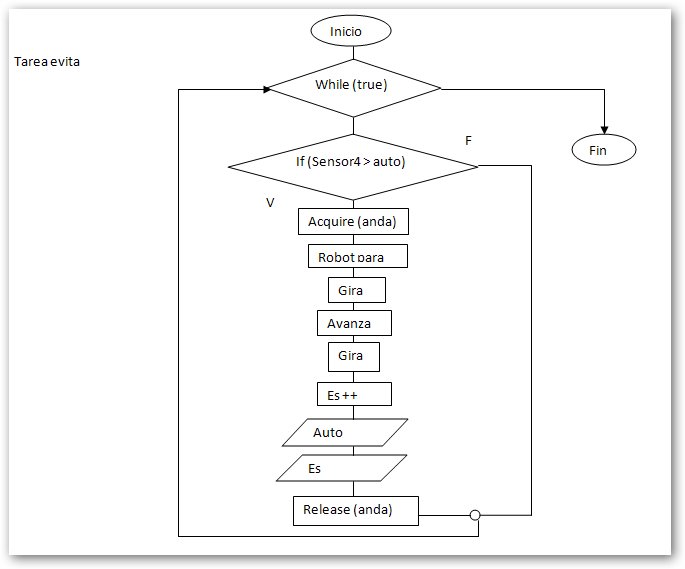
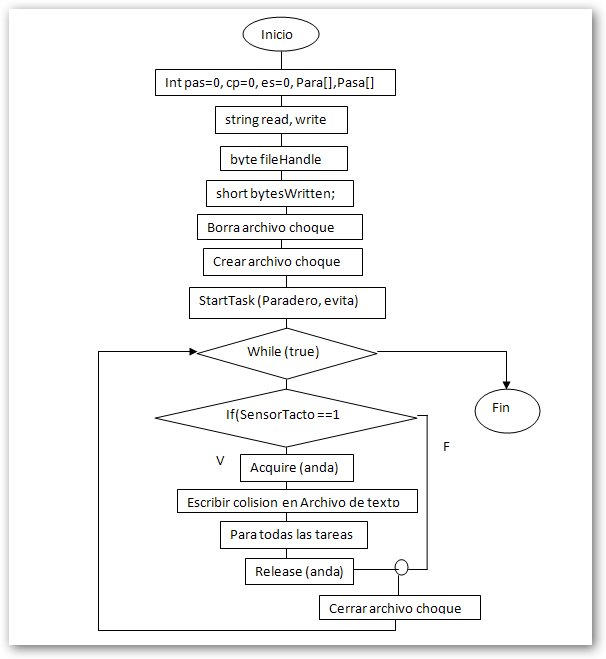
Diagrama de Flujo:

Conclusión
Luego de realizar esta actividad y de trabajar en equipo, llegamos a la conclusión de que trabajando ordenadamente y combinando nuestros conocimientos logramos plantear la actividad que realizaría el robot, esta sería simular ser un autobús que recolectaría pasajeros en distintos paraderos, para lograrlo aplicamos los conocimientos previos y nuevas ideas. Al realizar el código
Utilizamos el sensor de sonido el cual nos ayudó a detectar los diferentes vehículos en la carretera, el sensor de sonido, que cumpliría la función de que al momento de realizar un ruido simulara la cantidad de pasajeros que subirán en cada paradero siendo estos guardados en un contador que nos entregaría la cantidad total de pasajeros recolectados. y todas estas tareas estarían realizándose combinadamente a través de la utilización de tareas un array, guardando los textos en archivos.
Integrantes y cargos:
Camilo Rivas: Productor Multimedia.
Washinton Arevalos: Staff de Apoyo.
Ninoska Ulloa: Jefe de Grupo.
Alamiro Solis: Secretario.
Introducción:
En esta actividad la responsabilidad se nos dió a nosotros para crear lo que nosotros queramos con nuestro robot. Esta actividad puede ser junto a otro grupo o individual, en esta ocasión como grupo decidimos trabajar solos. Para ello nuestro robot simulara un autobús donde recolectara pasajeros en distintos paraderos, de tal manera que al completarse de pasajeros solo se dirija a destino y no recolecte más pasajeros, para ello nuestro robot debe cumplir con lo siguiente que se nos ha pedido: Manejar las estructuras de datos Arreglos (Arrays) y Archivos, y manejo de tareas concurrentes.
Además en esta actividad ocuparemos el sensor de sonidos, ultrasonido, luz y tacto, el cual cada uno de ellos cumplirá una función determinada por nosotros para que nuestro robot funcione a la perfección y cumpla con lo que son pide y nosotros mismo nos hemos propuesto realizar.
Estrategia de solución:
Durante la primera semana de trabajo, en esta actividad procedimos de la siguiente manera. Como en todas las actividades anteriores el staff de apoyo se preocupó de retirar los kits de trabajo de los estantes y ubicarlos en una mesa de trabajo. Posteriormente, revisó la bateria y la puso a cargar.El staff de apoyo y productor multimedia se encargan de dar la estructura adecuada al robot para que se desenvuelva de la mejor manera posible en su misión. Se acuerda un modelo simple, con sensores de ultrasonido, sonido, tacto y luz. El sensor de ultrasonidos nos ayudará a detectar vehículos en la carretera, los cuales esquivará o reducirá la velocidad para no chocarlos. Se llevará el conteo de cada paradero y de las personas que se subirán en cada uno de ellos. Lo que hará el sensor de tacto es dar instrucción de detenerse al bus en caso de choque. El sensor de sonido, al realizar un ruido, simulará la cantidad de pasajeros que subirán en cada paradero.
Respecto a la programación, el secretario y jefe de grupo comienzan a realizar el programa, surgen algunas complicaciones pero finalmente son solucionadas. Luego el staff de apoyo y productor multimedia se suman al equipo de programación para reforzar algunas debilidades que pudieran tener los otros integrantes.
Por motivos de tiempo, no pudimos avanzar más, el staff de apoyo devuelve los kits al estante.
Durante la segunda semana de trabajo, el staff de apoyo procede de la misma forma que la semana anterior. Se termina el programa y se realizan las pruebas. Se ven las deficiencias que tiene el programa, se hacen correcciones hasta que el robot genera el resultado esperado.
Finalmente el productor multimedia graba el video, edita y sube el video a la red.
Diagrama de Flujo:
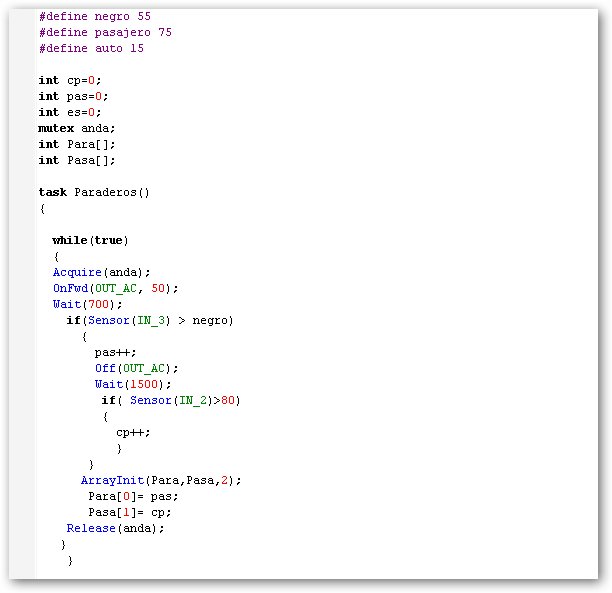
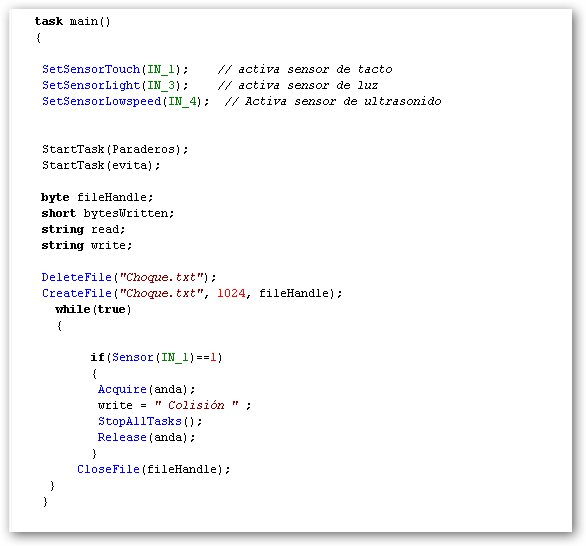
Código con la solución alcanzada:
Autoevaluación:
Integrante / cargo
|
Descripción
|
Nota
|
Ninoska Ulloa (jefe grupo)
|
Organiza de manera eficiente al grupo de trabajo
y ayuda en lo que falta o trae problemas.
|
6.4
|
Camilo Rivas (productor multimedia)
|
Cumple con lo que se le encarga y colabora con lo
que se pide en la actividad.
|
6.4
|
Alamiro Solis(secretario)
|
Toma apuntes de la actividad a realizar de buena
manera y ayuda en otras cosas que se le pide.
|
6.4
|
Washington Arevalos (staff de apoyo)
|
Apoya y colabora con todos los integrantes del
grupo, siendo eficiente en lo que se le pide.
|
6.4
|
Luego de realizar esta actividad y de trabajar en equipo, llegamos a la conclusión de que trabajando ordenadamente y combinando nuestros conocimientos logramos plantear la actividad que realizaría el robot, esta sería simular ser un autobús que recolectaría pasajeros en distintos paraderos, para lograrlo aplicamos los conocimientos previos y nuevas ideas. Al realizar el código
Utilizamos el sensor de sonido el cual nos ayudó a detectar los diferentes vehículos en la carretera, el sensor de sonido, que cumpliría la función de que al momento de realizar un ruido simulara la cantidad de pasajeros que subirán en cada paradero siendo estos guardados en un contador que nos entregaría la cantidad total de pasajeros recolectados. y todas estas tareas estarían realizándose combinadamente a través de la utilización de tareas un array, guardando los textos en archivos.








Suscribirse a:
Comentarios (Atom)